Toward Teach and Repeat Across Seasonal Deep Snow Accumulation
We deployed again to Forêt Montmorency in March 2025. With over 1 m of snow accumulation, it was a perfect time to start using the FoMo dataset for experiments. We used data from the November, January, and March deployments to construct teach maps for both lidar teach and repeat and radar teach and repeat.
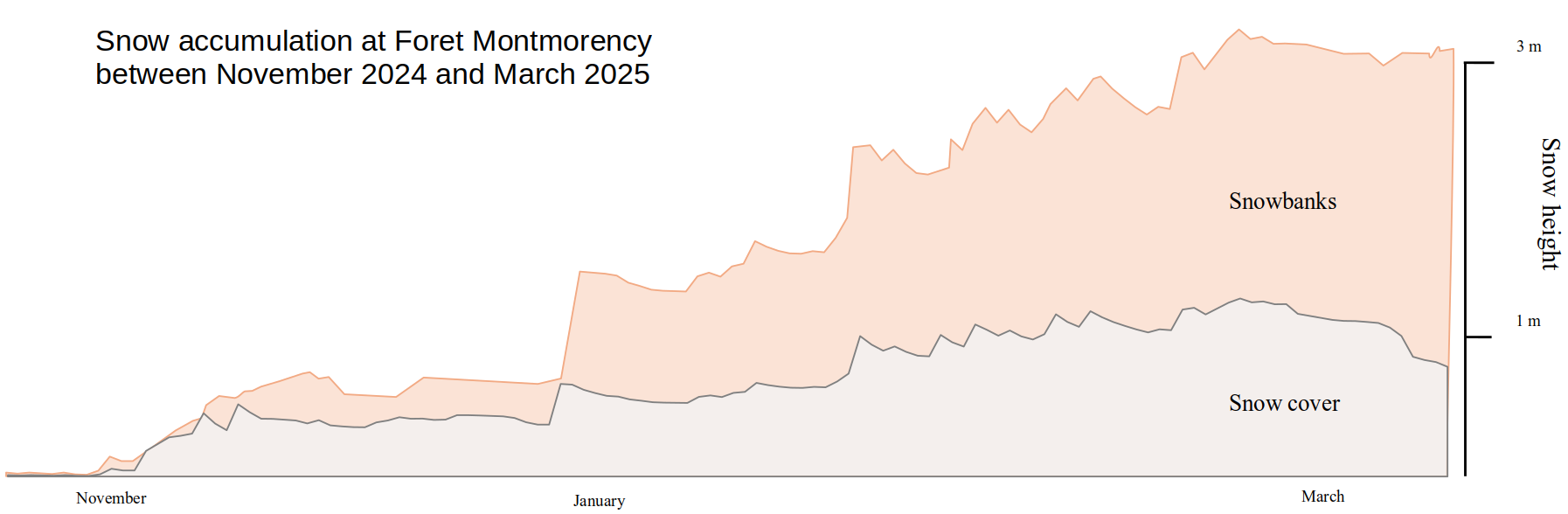
Between the initial recordings and our testing in March, over 1 m of snowpack had accumulated, with snowbanks reaching over 3 m along plowed roads.
Unsurprisingly, the appearance change of the scene was challenging for radar and localization. For reference, see this view from the robot in all three deployments.
The change in traversability of the ground was more difficult for teach and repeat than localization. The capabilities of the warthog with four tires on gravel are much larger than the warthog with four tracks on deep snow. This meant that some routes could be repeated, features such as sharp turns led to the robot getting stuck.
We look forward to exploring the question of traversability once all of the FoMo recordings are complete and the dataset is ready.
For more information, or to ask us questions, please come talk to us at the 2025 Workshop on Field Robotics. We will be presenting between 9:20 and 9:40. The workshop paper is on arXiv. Please take a look.