Quick jump to:
Projects

Datasets
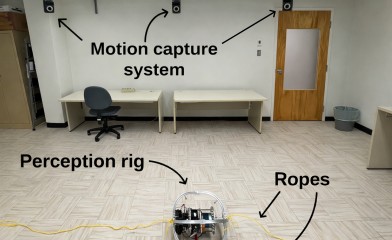
High-Resolution Motion Capture (HRMC) Dataset
The HRMC dataset provides high-frequency ground-truth motion data, capturing the full 6-degree-of-freedom (6-DoF) pose of the system over time. This includes...
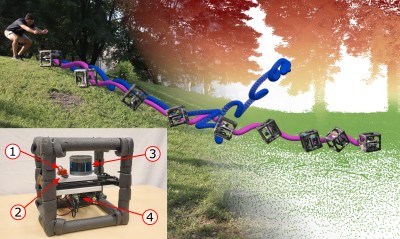
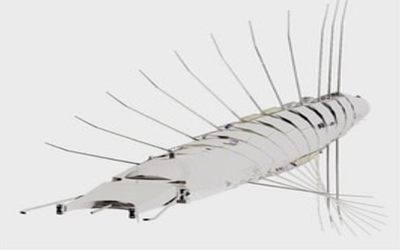
Tumbling-Induced Gyroscope Saturation (TIGS) Dataset
The TIGS dataset is designed to help researchers understand how sensors behave in extreme, real-world motion. It contains data recorded from a mechanical LiD...
FOMO - A Proposal for a Multi-Season Dataset for Robot Navigation in Forêt Montmorency
In this paper, we propose the FoMo (Forêt Montmorency) dataset: a comprehensive, multi-season data collection. Located in the Montmorency Forest, Quebec, Can...

BorealHDR Dataset
This repository contains the code used in our paper Exposing the Unseen: Exposure Time Emulation for Offline Benchmarking of Vision Algorithms accepted at IR...

RTS‐GT Dataset
This page gives a description about the RTS-GT Dataset. The following table describes the deployment done with some characteristics which are the prism data ...

DRIVE Datasets
This page is dedicated to sharing our datasets for our paper entitled “DRIVE: Data-driven Robot Input Vector Exploration”. The datasets for each experiment ...

Montmorency Forest Wintertime Dataset
This page is dedicated to sharing our dataset for our paper entitled “Kilometer-scale autonomous navigation in subarctic forests: challenges and lessons lear...
DARPA Subterranean Challenge ‐ Urban Dataset
Here are the recordings of the robots of the CTU-CRAS-Norlab team during the Urban circuit of the DARPA Subterranean Challenge. The recordings are in rosbag ...

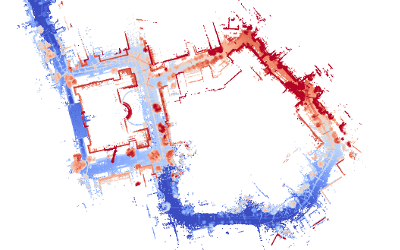
The Montmorency dataset
This large scale forest mapping dataset is now available for download on Valeria or on Academic Torrents. The dataset contains the ground truth species, diam...
Finished Projects



Tips & Tricks

Norlab robots
The list of our robots is growing, see for yourself! We like them rugged bacause they often go outdoors, collecting datasets, capturing lidar maps and drivin...

Lie theory cheatsheet
Lie theory in robotics
Norlab in media!
We are happy that Norlab is being noticed in media. See what they have written about us.
How to publish your preprints on Arxiv
Before submitting a preprint to arXiv, make sure the publisher permits preprints. In general, they require that:
How to synchronize an Overleaf Project with a GitHub repository
Writing papers with a large number of co-authors can be complicated endeavour. This why Overleaf is an interesting choice, as it allows for multiple people t...
Information for New Students
Welcome to the laboratory! It will take a couple of weeks to get you up and running in the lab, so why not use that time to explore different sources of info...
How to set a static transform with our interactive RVIZ tool
Sometimes, there is a need to quickly set up a static transform in ROS. To avoid manually searching for translation and rotation parameters, we have written ...
Information for Prospective Students
Here are some information for prospective students who want to apply to a position at Norlab. Read those information carefully before communicating with us.
How to comment a ROS launch file
I am always forgetting how to have a nested comments in a ROS launch file, so I’m putting this information here in the hope to reduce my time searching on Go...
How to Add Bibliography to a Post
This is a small tutorial on how to use the plugin jekyll-shcolar on this website.
Introduction to LaTeX with MathJax
Here are some basics to get you started with $\LaTeX$ equations in this Jekyll installation. This post assumes that you already know how to write an equation...
How to change this website
This is a quick tutorial on how to modify and deploy this website.